Note
Go to the end to download the full example code.
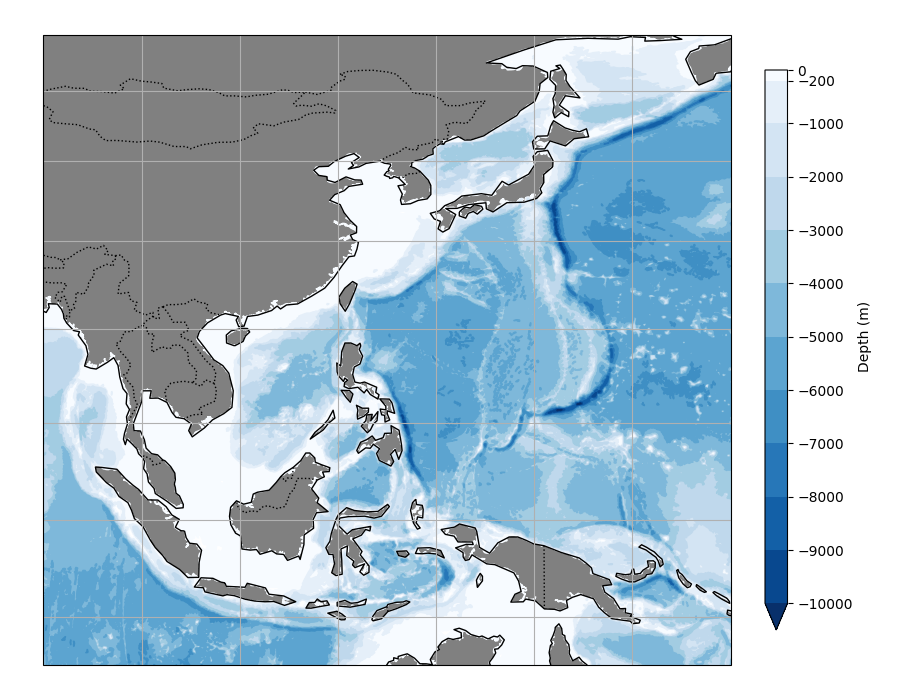
Ocean bathymetry#
Produces a map of ocean seafloor depth, demonstrating the
cartopy.io.shapereader.Reader interface. The data is a series
of 10m resolution nested polygons obtained from Natural Earth, derived
from the NASA SRTM Plus product. Since the dataset contains a zipfile with
multiple shapefiles representing different depths, the example demonstrates
manually downloading and reading them with the general shapereader interface,
instead of the specialized cartopy.feature.NaturalEarthFeature interface.
from glob import glob
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import cartopy.crs as ccrs
import cartopy.feature as cfeature
import cartopy.io.shapereader as shpreader
def load_bathymetry(zip_file_url):
"""Read zip file from Natural Earth containing bathymetry shapefiles"""
# Download and extract shapefiles
import io
import zipfile
import requests
r = requests.get(zip_file_url)
z = zipfile.ZipFile(io.BytesIO(r.content))
z.extractall("ne_10m_bathymetry_all/")
# Read shapefiles, sorted by depth
shp_dict = {}
files = glob('ne_10m_bathymetry_all/*.shp')
assert len(files) > 0
files.sort()
depths = []
for f in files:
depth = '-' + f.split('_')[-1].split('.')[0] # depth from file name
depths.append(depth)
bbox = (90, -15, 160, 60) # (x0, y0, x1, y1)
nei = shpreader.Reader(f, bbox=bbox)
shp_dict[depth] = nei
depths = np.array(depths)[::-1] # sort from surface to bottom
return depths, shp_dict
if __name__ == "__main__":
# Load data (14.8 MB file)
depths_str, shp_dict = load_bathymetry(
'https://naturalearth.s3.amazonaws.com/' +
'10m_physical/ne_10m_bathymetry_all.zip')
# Construct a discrete colormap with colors corresponding to each depth
depths = depths_str.astype(int)
N = len(depths)
nudge = 0.01 # shift bin edge slightly to include data
boundaries = [min(depths)] + sorted(depths+nudge) # low to high
norm = matplotlib.colors.BoundaryNorm(boundaries, N)
blues_cm = matplotlib.colormaps['Blues_r'].resampled(N)
colors_depths = blues_cm(norm(depths))
# Set up plot
subplot_kw = {'projection': ccrs.LambertCylindrical()}
fig, ax = plt.subplots(subplot_kw=subplot_kw, figsize=(9, 7))
ax.set_extent([90, 160, -15, 60], crs=ccrs.PlateCarree()) # x0, x1, y0, y1
# Iterate and plot feature for each depth level
for i, depth_str in enumerate(depths_str):
ax.add_geometries(shp_dict[depth_str].geometries(),
crs=ccrs.PlateCarree(),
color=colors_depths[i])
# Add standard features
ax.add_feature(cfeature.LAND, color='grey')
ax.coastlines(lw=1, resolution='110m')
ax.gridlines(draw_labels=False)
ax.set_position([0.03, 0.05, 0.8, 0.9])
# Add custom colorbar
axi = fig.add_axes([0.85, 0.1, 0.025, 0.8])
ax.add_feature(cfeature.BORDERS, linestyle=':')
sm = plt.cm.ScalarMappable(cmap=blues_cm, norm=norm)
fig.colorbar(mappable=sm,
cax=axi,
spacing='proportional',
extend='min',
ticks=depths,
label='Depth (m)')
# Convert vector bathymetries to raster (saves a lot of disk space)
# while leaving labels as vectors
ax.set_rasterized(True)
Total running time of the script: (0 minutes 20.504 seconds)